In the ever-evolving landscape of technology, manufacturing, and digital systems, new terminologies emerge to capture the essence of innovative processes. One such term that has begun to circulate in specialized engineering and automation circles is rosboxar. While it may appear cryptic at first glance, rosboxar represents a convergence of robotics, box handling, and augmented reality (AR) in automated logistics. This article delves into the definition, applications, benefits, and future potential of rosboxar, providing a thorough understanding for engineers, warehouse managers, and tech enthusiasts.
What Exactly is Rosboxar?
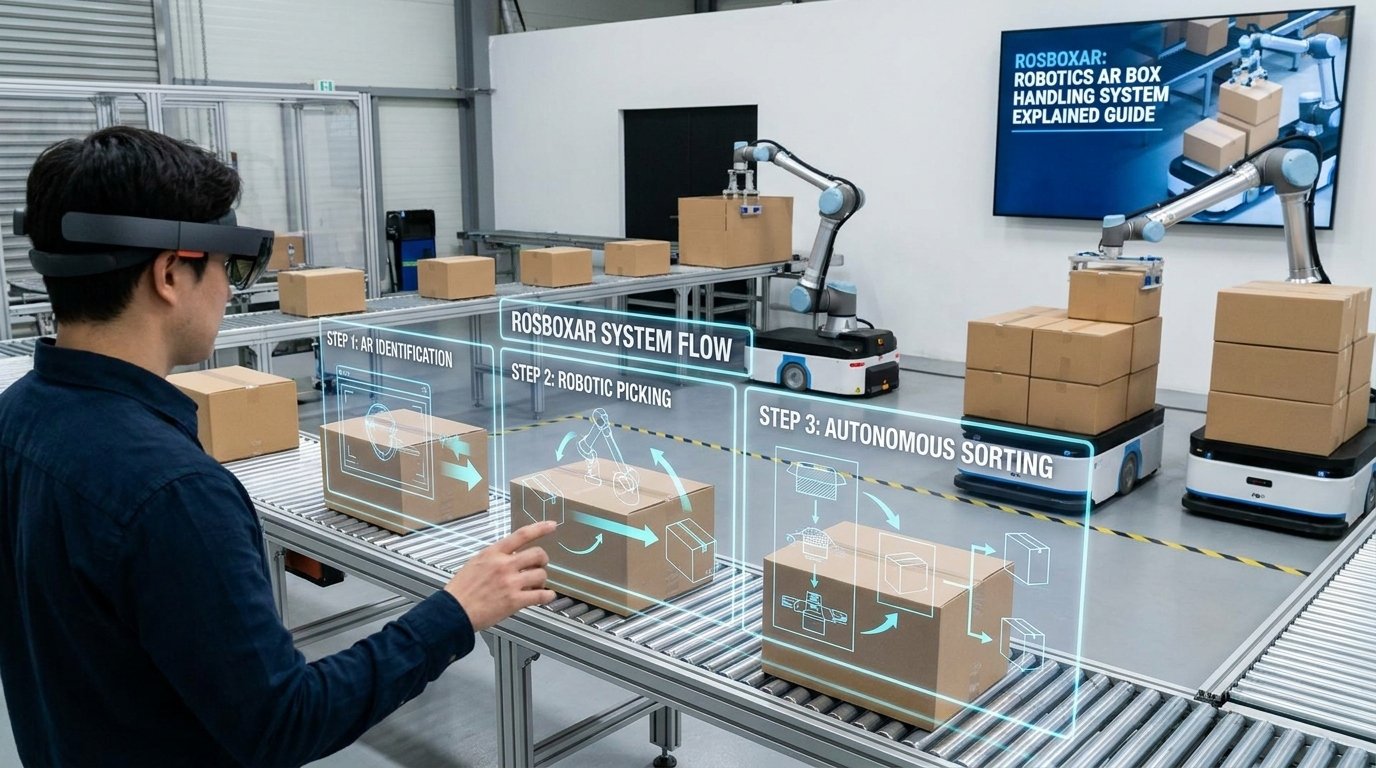
The term rosboxar is a portmanteau derived from three distinct technological domains: Robot Operating System (ROS), box handling, and Augmented Reality (AR). In essence, rosboxar refers to a hybrid system where ROS-based robotic arms or autonomous mobile robots (AMRs) are guided by AR interfaces to manipulate, sort, pack, or unpack boxes in dynamic environments. Unlike fully automated systems that operate on fixed logic, rosboxar integrates human oversight through AR glasses or tablets, allowing operators to intervene, reprogram, or optimize box-handling tasks in real-time.
The core idea behind rosboxar is flexibility. Traditional automated box handling requires rigid infrastructure: conveyor belts, fixed robotic cells, and pre-defined box sizes. rosboxar, however, leverages the modularity of ROS (an open-source middleware for robotics) and the adaptive visualization of AR to handle heterogeneous boxes — varying in size, weight, and material — without extensive reprogramming.
The Technical Architecture of Rosboxar
To understand why rosboxar is gaining traction, one must examine its three foundational layers.
ROS Middleware Layer: The robotic operating system provides essential services like hardware abstraction, low-level device control, message-passing between processes, and package management. In rosboxar, ROS nodes control robotic grippers, depth cameras, and lidar sensors. The famous ROS package
MoveItis often used for motion planning, allowing the robot to calculate collision-free trajectories around irregularly stacked boxes.Box Perception Subsystem: Using Intel RealSense or similar depth sensors, rosboxar creates a 3D point cloud of the work area. Custom ROS nodes then segment individual boxes from the cloud, estimating their dimensions, orientation, and centroid. Machine learning models (e.g., YOLO or PointNet) are often integrated to identify box types, barcodes, or damage.
Augmented Reality Overlay: This is where rosboxar differentiates itself. An operator wears AR glasses (e.g., Microsoft HoloLens or Magic Leap). The ROS system streams perception data to the AR device. The operator sees virtual bounding boxes around physical boxes, real-time force feedback from the gripper, and predicted pick/drop locations. Conversely, the operator can “draw” new pick zones in the air, and the AR system publishes those coordinates as ROS topics, commanding the robot.
This bidirectional loop makes rosboxar a form of semi-autonomous human-robot collaboration, not a black-box automation solution.
Key Applications of Rosboxar
The versatility of rosboxar allows it to thrive in environments where pure automation fails. Below are four primary applications.
1. E-commerce Fulfillment Centers
Online retail deals with thousands of SKUs in irregular boxes. A fixed robot might fail if a box is slightly crushed or taped oddly. rosboxar enables a remote operator to supervise up to six robots simultaneously. When a robot encounters an anomaly (e.g., a slippery plastic wrap), the AR overlay highlights the issue. The operator can drag a virtual grip point to a better location, and the robot adjusts instantly. This reduces downtime by 60% compared to pure manual teleoperation.
2. Last-Mile Sorting Hubs
In courier and postal services, boxes arrive in mixed orientations on a fast-moving belt. rosboxar systems use overhead cameras and ROS-based tracking to predict box trajectories. Instead of mechanical diverters, a robotic arm equipped with a suction gripper — guided by AR annotations — picks and places each box into destination chutes. The AR component allows a human to quickly re-label chutes during peak hours without pausing the line.
3. Manufacturing Kitting
Automotive and electronics plants require specific components in specific boxes for assembly lines. rosboxar assists kitting: a worker wearing AR glasses sees a visual overlay showing which box to pick and where to place it on a pallet. Meanwhile, a ROS-powered robotic cart carries the pallet. The worker’s hand movements are tracked and fused with the robot’s motion, turning rosboxar into a collaborative “co-worker” that reduces walking time by 40%.
4. Hazardous Material Handling
In chemical or pharmaceutical warehouses, humans cannot physically touch certain boxes. Teleoperated robots are slow due to video latency. rosboxar reduces latency by offloading perception to the robot’s local ROS system and using AR for high-level commands. The operator sees an AR skeleton of the box through the wall (via pre-scanned data) and simply pinches the air to command a pick. The robot executes the motion autonomously, combining safety with speed.
Benefits Over Traditional Automation
Why choose rosboxar over a conventional automated storage and retrieval system (ASRS) or manual labor? The advantages are compelling.
Reduced Programming Time: Traditional industrial robots require offline programming for each new box type. rosboxar uses AR-assisted teaching-by-demonstration. An operator can move a virtual model of the robot arm in AR space, and the ROS system records the path as a new routine. Programming a new box handling task drops from hours to minutes.
Graceful Adaptation to Edge Cases: Boxes often arrive with damaged corners, wet surfaces, or no clear edge. A pure ROS autonomous system might fail and stop. With rosboxar, the AR interface lets a human expert take over just for the tricky box, then resume autonomy. This hybrid control achieves near-100% uptime.
Lower Capital Expenditure: Full automation requires expensive custom tooling and weeks of integration. rosboxar leverages low-cost ROS-compatible robotic arms (e.g., Ufactory xArm or Franka Emika) and consumer AR glasses. For small and medium enterprises, rosboxar makes robotic box handling accessible at a fraction of the cost.
Intuitive Debugging and Monitoring: When a robot fails, traditional systems show cryptic error codes. rosboxar displays the robot’s internal state as an AR heatmap: red for high torque, blue for free movement. An operator can see exactly where a jam occurred and annotate the problem for future AI training.
Challenges and Limitations of Rosboxar
No system is perfect, and rosboxar faces several hurdles before mainstream adoption.
Latency Sensitivity: The closed-loop control between AR gestures and ROS actions requires sub-50ms round-trip latency. Over Wi-Fi or 5G, this is achievable, but in congested industrial environments, packet loss can cause lag. Edge computing nodes co-located with the robot are often necessary.
Calibration Complexity: For the AR overlay to align perfectly with physical boxes, the ROS camera’s coordinate frame and the AR headset’s world frame must be precisely calibrated. This often requires a manual checkerboard calibration routine every shift, which some workers find tedious.
User Fatigue: Wearing AR glasses for an eight-hour shift causes physical strain. Moreover, interacting with virtual objects in mid-air (without tactile feedback) is less intuitive than pressing a physical button. rosboxar interfaces must be redesigned with ergonomic, brief interactions rather than continuous use.
Security Risks: Because rosboxar involves both ROS (which historically had weak security defaults) and network-connected AR devices, the attack surface is large. A hacked AR headset could send malicious twist commands to a robotic arm, causing physical damage. Secure implementation requires ROS 2 with DDS security and endpoint authentication.
The Future of Rosboxar
Looking ahead, three trends will shape the evolution of rosboxar.
Generative AI for Box Handling: Instead of an operator manually correcting a robot, a large language model (LLM) integrated with rosboxar could interpret voice commands: “Robot, treat the blue box as fragile, use 30% less grip force.” The LLM generates a ROS action goal on the fly.
Shared Autonomy Learning: Every time an operator uses AR to correct a robot, that correction can be recorded as a training data point. Over time, the rosboxar system learns from hundreds of human interventions, gradually improving its native autonomous performance. This human-in-the-loop reinforcement learning is a research frontier.
Swarm Rosboxar: Multiple robots and multiple AR users could collaborate on a single large task, such as de-palletizing a mixed container. Through a shared ROS master and synchronized AR coordinates, each worker sees the swarm’s intended plan. If one robot fails, another automatically takes over, guided by the same AR overlay.
Implementation Roadmap for Businesses
For a warehouse or factory considering rosboxar, here is a phased approach:
Phase 1 (Assessment): Identify box-handling tasks that are highly variable (multiple SKUs, irregular arrivals) but not safety-critical. Measure current error rates and cycle times.
Phase 2 (Pilot): Set up one ROS-based robotic arm (e.g., Universal Robots UR10e) with a wrist-mounted depth camera. Deploy one AR headset running an open-source tool like ARviz (an AR interface for ROS). Train two operators for one week.
Phase 3 (Integration): Connect the pilot rosboxar cell to your warehouse management system (WMS) via ROS bridges. Implement logging for every pick-and-place action.
Phase 4 (Scaling): Expand to multiple cells, sharing perception data across ROS namespaces. Begin collecting telemetry to calculate ROI. Most businesses report ROI within 9-14 months for rosboxar deployments.
Conclusion
Rosboxar is more than a clever keyword; it represents a paradigm shift from rigid automation to fluid human-robot collaboration. By combining the open-source flexibility of ROS, the physical dexterity of robotic box handling, and the intuitive visualization of augmented reality, rosboxar solves the long-standing problem of handling unpredictable box shapes and sizes in real-world logistics. While challenges in latency, calibration, and security remain, the benefits of reduced programming time, graceful anomaly handling, and lower capital costs make rosboxar an attractive solution for e-commerce, manufacturing, and dangerous goods handling.
As AR hardware becomes lighter and ROS 2 gains wider industrial adoption, expect rosboxar to become a standard tool in the smart warehouse of 2026 and beyond. For businesses looking to stay competitive, now is the time to experiment with rosboxar — a small investment in hybrid automation that yields substantial returns in resilience and efficiency.